Lab05-IMU-Hardware
Nowoczesne Sensory w Robotyce
Politechnika Poznańska, Instytut Robotyki i Inteligencji Maszynowej
![]()
Laboratorium 5: IMU - Hardware
Powrót do wyboru zajęć ## Ważne uwagi organizacyjne
Ze sprzętem laboratoryjnym należy obchodzić się ostrożnie. Nie odłączać kabli sieciowych od komputerów.
Sprzęt laboratoryjny
Cel zajęć
Uruchomienie sensora IMU, przy pomocy SDK, oraz drivera w ROS 2. Zapoznanie się z danymi, które dostarcza sensor IMU. Oraz nagranie danych, których użyjemy podczas następnych zajęć.
Środowisko pracy
Na potrzeby tych zajęć został stworzony obraz Dockera który można pobrać.
docker pull stanislawkuczma/ros2-humble-xsens:latest
Oprogramowanie dostarczone przez producenta można znaleźć na tej stronie. Proszę pobrać i zainstalować MT Manager, który zawiera biblioteki SDK, a następnie uruchomić oprogramowanie do odczytu danych z IMU.
Przy instalacji może być pomocna ta instrukcja. Wszystkie potrzebna biblioteki powinny już być zainstalowane w obrazie Dockera, więc nie powinno być problemów z uruchomieniem oprogramowania.
Po uruchomieniu oprogramowania, proszę podłączyć IMU do komputera i sprawdzić, czy dane są poprawnie odczytywane.
Jaki jest baudrate sensora? Czy można go zmienić? Jakie są inne parametry komunikacji?

Driver ROS 2
Do obsługi IMU pod ROSem użyjemy tego drivera.
Proszę pobrać odpowiedni branch.
git clone -b ros2 https://github.com/xsenssupport/Xsens_MTi_ROS_Driver_and_Ntrip_Client.git
W celu uruchomienia drivera należy wykonać następującą komendę:
ros2 launch xsens_mti_ros2_driver xsens_mti_node.launch.py
lub
ros2 launch xsens_mti_ros2_driver display.launch.py
Uruchomi się wtedy driver, który będzie publikował dane z IMU na temat pozycji, orientacji, przyspieszenia liniowego oraz kątowego.
Zadanie
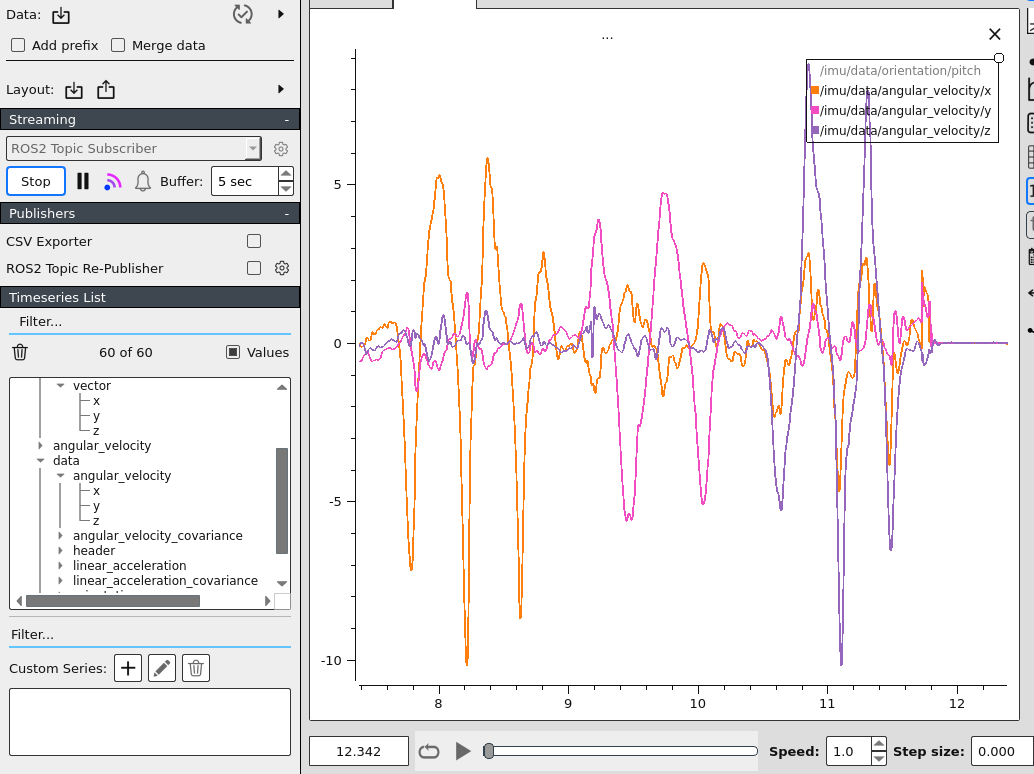
Prosze uruchomić driver i w programie plotjuggler wyświetlić na jednym wykresie orientację w trzech osiach, a na drugim przyspieszenie liniowe.
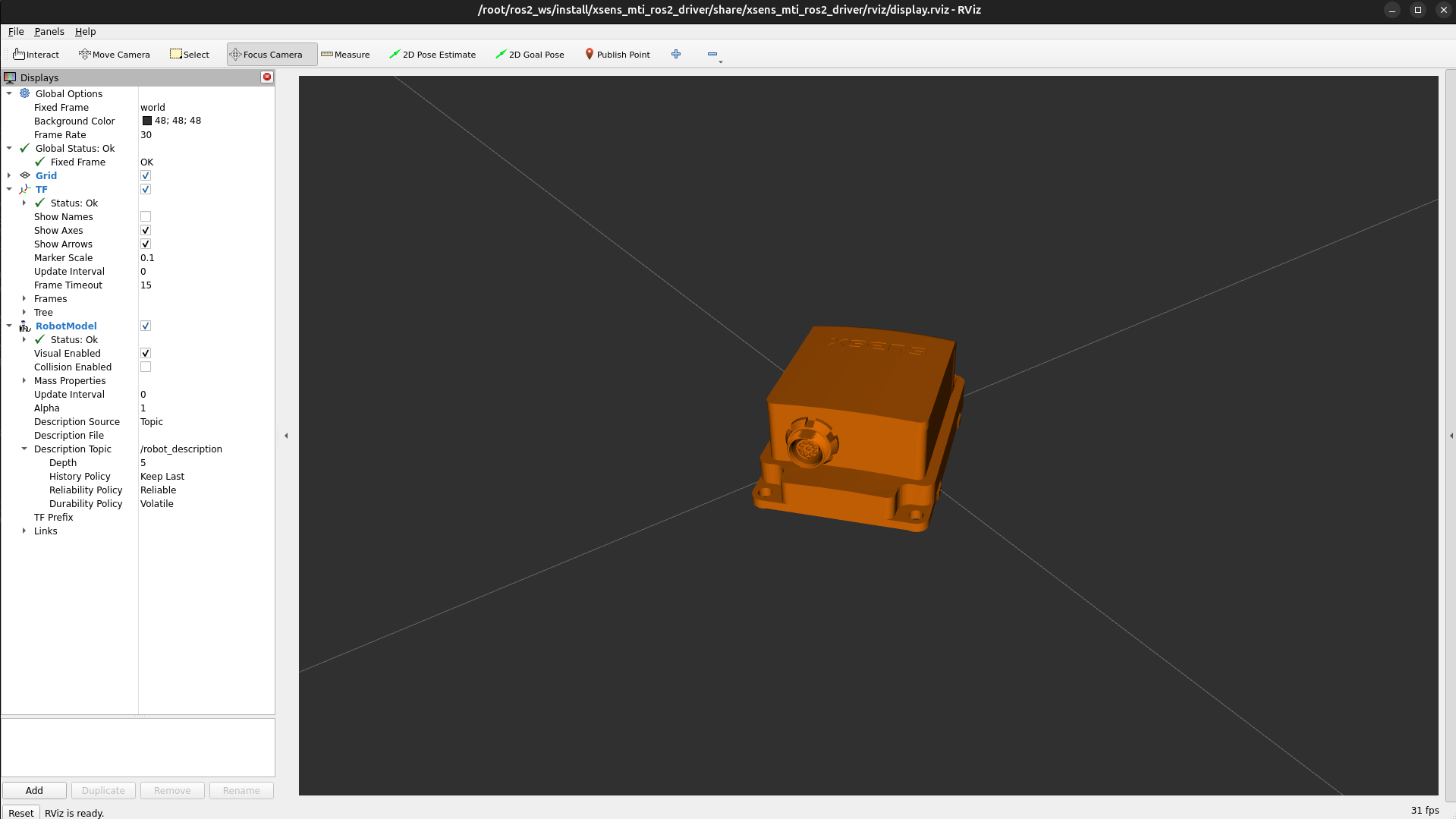
Proszę też zmienić model sensora, żeby w rivz2 był widoczny model odpowiadający naszemu sensorowi.
Następnie proszę przećwiczyć różne ruchy sensorem i obserwować jak zmieniają się dane. Nagrać te dane, które będą potrzebne do następnych zajęć. Proponuję jakiś wzór który będziemy próbować odwzorować na wykresie.
ros2 bag record
Proszę się upewnić że nagranie jest poprawne.
Na eKursy wrzucić:
- Screen z SDK od xsensa.
- Screen 2 wykresów z plotjugglera.
- Screen z RViz2 z poprawnym modelem sensora.
- Bag z nagranymi danymi. (20s wystarczy)