Lab10-RealSense-Software
Nowoczesne Sensory w Robotyce
Politechnika Poznańska, Instytut Robotyki i Inteligencji Maszynowej
![]()
Laboratorium 10: RealSense Software
Powrót do wyboru zajęć ## Ważne uwagi organizacyjne
Ze sprzętem laboratoryjnym należy obchodzić się ostrożnie. Nie odłączać kabli sieciowych od komputerów.
Cel zajęć
Celem laboratorium jest zapoznanie z przetwarzaniem danych z kamery RGB-D RealSense.
Sprzęt laboratoryjny
Środowisko pracy
Takie samo jak na poprzednich zajęciach.
Proszę uruchomić kontener z poprzednich zajęć, a następnie uruchomić driver do kamery RealSense.
ros2 launch realsense2_camera rs_launch.py pointcloud.enable:=true enable_color:=true align_depth.enable:=trueCo robi opcja
align_depth.enable? Jakie są inne opcje?
Zadanie 1 - Wirtualny Dalmierz
Napiszcie węzeł ROS 2, który w czasie rzeczywistym odczytuje odległość do obiektu znajdującego się dokładnie w centrum pola widzenia kamery, a następnie wypisuje ją (w metrach) w terminalu.

Zadanie 2 - Green Screen
Proszę napisać węzeł ROS 2, który w czasie rzeczywistym odczytuje obraz RGB z kamery, a następnie zamienia wszystkie piksele, które są dalsze niż 1 metr od kamery, na kolor zielony.
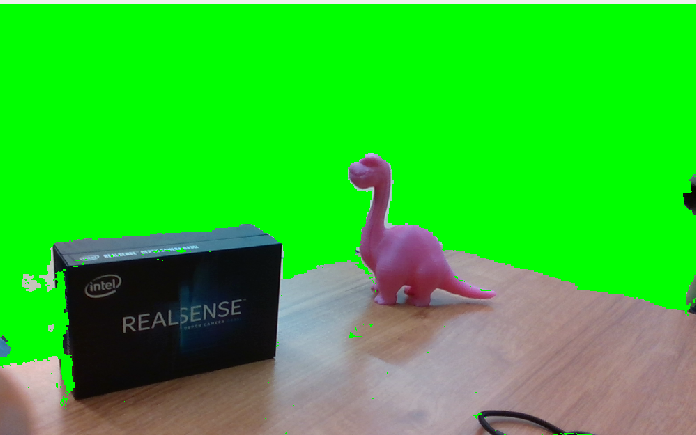 Przykładowy efekt
Przykładowy efekt
Zadanie 3
Proszę znaleźć znacznik AprilTag, odczytać jego pozycję, następnie wyznaczyć odległość go od kamery oraz opublikować TF między ramką kamery, a ramką znacznika.
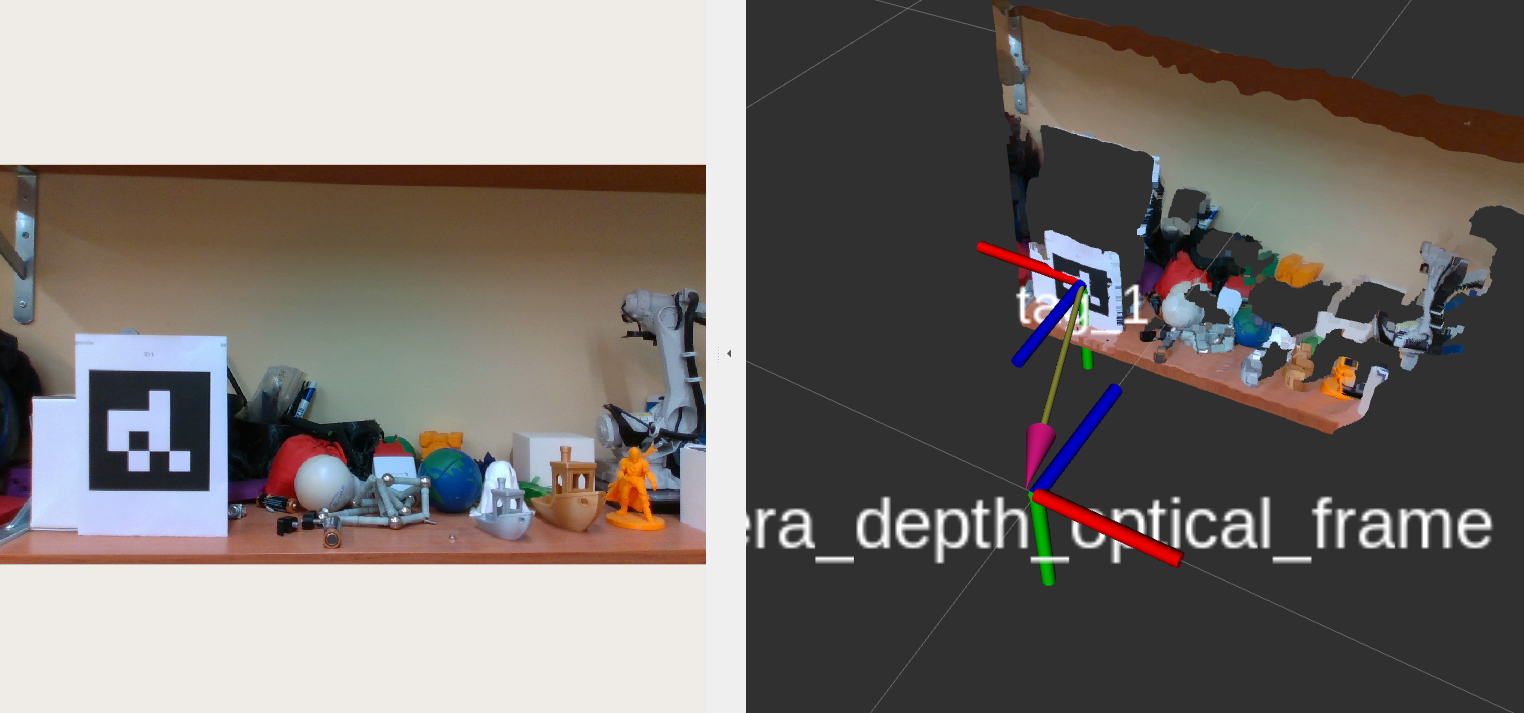
Co na eKursy?
Proszę wrzucić zdjęcie z RViza, na którym widać chmurę punktów z kamery RealSense oraz odłożony układ TF między kamerą a znacznikiem AprilTag, udowadniający poprawne działanie Zadania 3 (podobnie jak na powyższym zrzucie ekranu).