Lab11-DGPS
Nowoczesne Sensory w Robotyce
Politechnika Poznańska, Instytut Robotyki i Inteligencji Maszynowej
![]()
Laboratorium 11: Obsługa danych GPS (ROS2)
Ważne uwagi organizacyjne
Ze sprzętem laboratoryjnym należy obchodzić się ostrożnie. Nie odłączać kabli sieciowych od komputerów.
Cel zajęć
Celem zajęć jest wizualizacja oraz porównanie danych z odbiornika GPS
i DGPS (Differential Global Positioning System). Studenci nauczą się
konwertować współrzędne geograficzne do układu metrycznego (UTM),
publikować trajektorie w ROS2 oraz korzystać z narzędzia
evo do analizy błędów pozycjonowania.
Wstęp
GPS (Global Positioning System) to satelitarny system nawigacyjny umożliwiający wyznaczanie pozycji na powierzchni Ziemi. Standardowy odbiornik GPS osiąga dokładność rzędu kilku metrów. DGPS (Differential GPS) wykorzystuje dodatkową stację referencyjną do korekcji błędów, osiągając dokładność na poziomie centymetrów.
UTM (Universal Transverse Mercator) to układ współrzędnych, w którym pozycje wyrażone są w metrach, co ułatwia obliczenia odległości i wizualizację trajektorii.
Przygotowanie środowiska
Proszę pobrać docker image
docker pull stanislawkuczma/ros2-humble💡 Tip: Dane do zajęć (folder
nswr_dgps_rosbag2) należy pobrać z Chmury PP.
Uruchomienie
Skrypt uruchamiający kontener
IMAGE_NAME="stanislawkuczma/ros2-humble:latest"
CONTAINER_NAME="<your_index>"
DOMAIN=${CONTAINER_NAME: -2}
xhost +local:root
XAUTH=/tmp/.docker.xauth
if [ ! -f $XAUTH ]
then
xauth_list=$(xauth nlist :0 | sed -e 's/^..../ffff/')
if [ ! -z "$xauth_list" ]
then
echo $xauth_list | xauth -f $XAUTH nmerge -
else
touch $XAUTH
fi
chmod a+r $XAUTH
fi
docker stop $CONTAINER_NAME || true && docker rm $CONTAINER_NAME || true
docker run -it \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--env="ROS_DOMAIN_ID=$DOMAIN" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
--env="XAUTHORITY=$XAUTH" \
--volume="$XAUTH:$XAUTH" \
--volume="/dev:/dev" \
--volume="$PWD:/root/ros2_ws" \
--privileged \
--network=host \
--name="$CONTAINER_NAME" \
$IMAGE_NAME \
/bin/bashUruchamiamy kontener kodem powyżej.
./run.shProszę zwrócić uwagę, na tą linikę w skrypcie:
--volume="$PWD:/root/ros2_ws" \Oznacza ona, że aktualny katalog (gdzie jest skrypt) będzie dostępny
w kontenerze pod ścieżką /root/ros2_ws. Dlatego ważne jest,
aby skrypt run.sh znajdował się w katalogu, gdzie są dane
do zajęć (folder nswr_dgps_rosbag2).
Proszę też doinstalować bibliotekę utm, która będzie
potrzebna do konwersji współrzędnych geograficznych do układu UTM.
sudo apt install python3-pip
pip install utmW drugim terminalu sprawdzić zawartość nagranych danych i je odtworzyć:
# Sprawdzenie topic'ów w pliku rosbag
ros2 bag info nswr_dgps_rosbag2
# Odtworzenie danych (opcjonalnie: -r 2 dla 2x prędkości)
ros2 bag play nswr_dgps_rosbag2📝 Pytanie: Jakie tematy (topics) zawiera plik rosbag? Jakiego typu są wiadomości GPS?
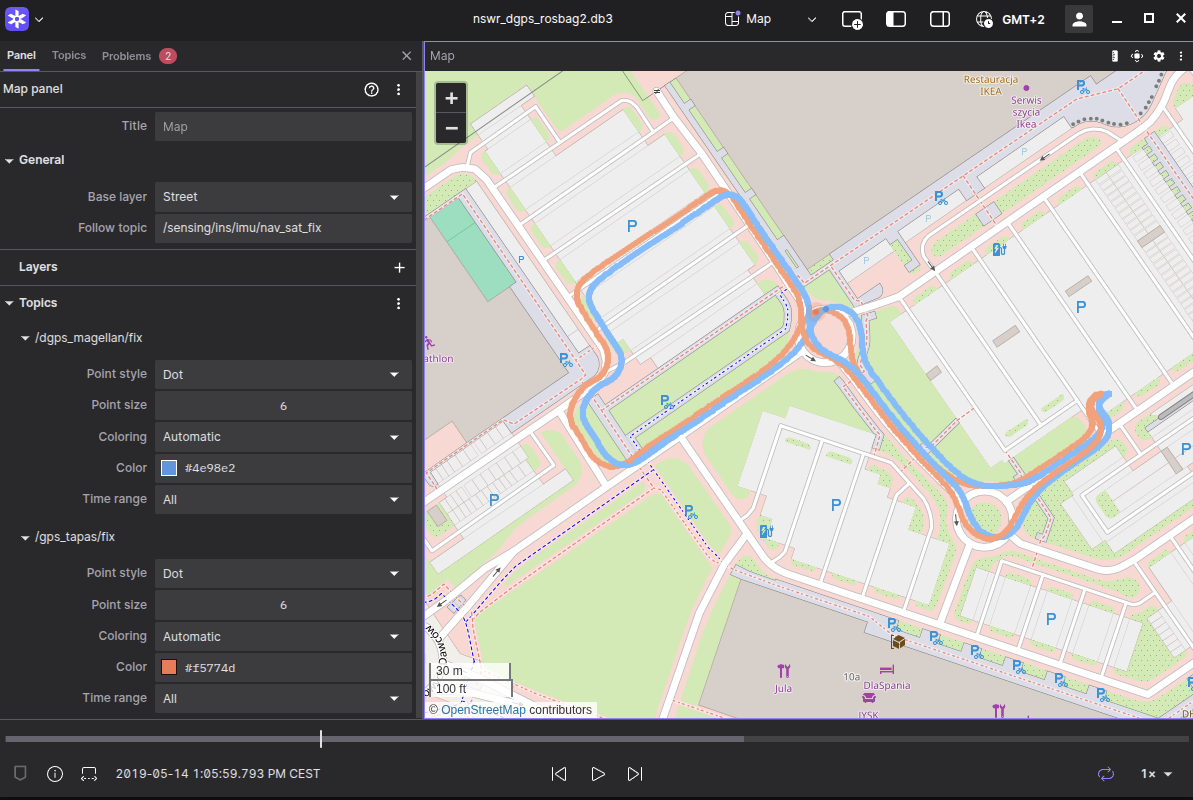
Zadanie 1: Wizualizacja w Foxglove
Przy pomocy narzędzia Foxglove
Studio można sobie wygodnie wyświetlić dane z Baga. W tym celu
proszę uruchomić Foxglove Studio, zalogować się, a następnie zamiast
tworzenia nowego połączenia, wybrać opcję “Open from file” i wskazać
plik nswr_dgps_rosbag2. Po załadowaniu danych, można dodać
wykresy dla tematów gps_tapas i dgps_magellan,
aby porównać trajektorie obu odbiorników, również na mapie od
OpenStreetMap. Na dole jest możliwość zatrzymania oraz przewijania
danych.
Aby w ten sposób wyświetlić dane, nie trzeba ich odtwarzać za pomocą
ros2 bag play, ponieważ Foxglove odczytuje dane
bezpośrednio z pliku rosbag. Nie trzeba też w ogóle uruchamiać
kontenera.
Zadanie 2: Wizualizacja trajektorii GPS w RViz
Korzystając z dostarczonego szablonu programu, należy zwizualizować trajektorie obydwóch odbiorników GPS w programie RViz.
Szablon Kodu
import nav_msgs
import rclpy
from rclpy.node import Node
from nav_msgs.msg import Odometry
from std_msgs.msg import Header
from sensor_msgs.msg import NavSatFix, NavSatStatus
import utm
import math
class GPS(Node):
def __init__(self):
super().__init__('nswr_gps')
# GPS Fix subscribers
# self.subscription_tapas = self.create_subscription()
# Create topic for odometry publishers
# self.publisher_tapas_odom = self.create_publisher()
self.easting_offset = 0
self.northing_offset = 0
self.alt_offset = 0
# Initalize empty file
with open("tapas.txt", 'w') as file:
file.close()
def tapas_callback(self, fix):
if fix.status.status == NavSatStatus.STATUS_NO_FIX:
return
# Convert latitude and longitude to UTM coordinates
# u = utm.from_latlon()
# Declare odometry message
odom = Odometry()
# Fill odometry message time and frames
odom.header.stamp = fix.header.stamp
odom.header.frame_id = "map"
odom.child_frame_id = fix.header.frame_id
# Fill "position" in odom message (https://docs.ros2.org/foxy/api/nav_msgs/msg/Odometry.html)
# easting: the x coordinate
# northing: the y coordinate
# fix.altitude: the z coordinate
# Publish odometry message
self.publisher_tapas_odom.publish(odom)
def main(args=None):
rclpy.init(args=args)
gps = GPS()
rclpy.spin(gps)
gps.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()Wymagania:
- Odczytać współrzędne geograficzne z dwóch tematów:
gps_tapas— odbiornik GPSdgps_magellan— odbiornik DGPS
- Przekonwertować współrzędne geograficzne (latitude, longitude) do
układu UTM za pomocą funkcji
utm.from_latlon(). - Utworzyć i opublikować wiadomość typu
nav_msgs/msg/Odometrydla każdego odbiornika.- Pola związane z orientacją ustawić na kwaternion jednostkowy:
(0, 0, 0, 1). - Pola kowariancji można pominąć.
- Pola związane z orientacją ustawić na kwaternion jednostkowy:
- Trajektoria musi być wyrażona relatywnie do
pierwszej odczytanej pozycji (pierwsza wiadomość → współrzędne
(0, 0, 0)), aby łatwo zlokalizować trajektorię w RViz.
⚠️ Uwaga: Część podpunktów jest już zaimplementowana w szablonie — należy uzupełnić brakujące fragmenty kodu.
Rozwiązanie
Zrzut ekranu z RViz przedstawiający obydwie trajektorie jednocześnie.
Zadanie 3: Zapis trajektorii do pliku
Zapisać trajektorie obydwóch odbiorników do osobnych plików
tekstowych w formacie TUM (kompatybilnym z narzędziem
evo).
Format pliku (TUM):
Każda linia odpowiada jednej pozycji:
timestamp tx ty tz qx qy qz qw| Pole | Opis |
|---|---|
timestamp |
Znacznik czasu w sekundach |
tx, ty, tz |
Współrzędne pozycji GPS w metrach (UTM) |
qx, qy, qz, qw |
Orientacja jako kwaternion — przyjąć 0 0 0 1 |
💡 Wskazówka: Aby uzyskać poprawny znacznik czasu (timestamp) dla formatu TUM, należy połączyć sekundy i nanosekundy z nagłówka wiadomości: timestamp = sec + (nanosec * 1e-9).
Rozwiązanie
Dwa pliki tekstowe: tapas.txt i
magellan.txt.
Zadanie 4: Analiza
błędu APE z użyciem evo
Korzystając z narzędzia evo obliczyć
APE (Absolute Pose Error) między obydwoma trajektoriami
oraz wygenerować wykresy porównawcze.
Instalacja evo:
pip install evo --upgrade --no-binary evoZadanie 5: Obliczenie długości trajektorii
Obliczyć całkowitą długość każdej z trajektorii GPS, uwzględniając zmianę wysokości (3D).
Wymagania:
- Dla każdej kolejnej pary punktów obliczyć odległość euklidesową w 3D:
\[d = \sqrt{\Delta x^2 + \Delta y^2 + \Delta z^2}\]
- Zsumować odległości dla całej trajektorii.
- Wyświetlić wynik w metrach w konsoli.
💡 Pytanie: Jak duża jest różnica w długości trajektorii między GPS a DGPS? Czym może być spowodowana?
Rozwiązanie
Zrzut ekranu z konsoli z obliczonymi długościami obu trajektorii.
Komendy:
# Wizualizacja obu trajektorii
evo_traj tum tapas.txt magellan.txt --plot
# Obliczenie APE i wygenerowanie wykresów
evo_ape tum tapas.txt magellan.txt --plotCo na eKursy:
- Zrzut ekranu z Foxglove z mapą i położeniem odbiorników (Zadanie 1)
- Zrzut ekranu z RViz z trajektoriami (Zadanie 2)
- Pliki
tapas.txtimagellan.txt(Zadanie 3) - Cztery wykresy z
evo(Zadanie 4) - Zrzut ekranu z konsoli z długościami trajektorii (Zadanie 5)