Lab 01 - Introduction
Robotics II
Poznan University of Technology, Institute of Robotics and Machine Intelligence
![]()
Laboratory 1: Introduction to Formula Student Driverless Simulator
Back to the course table of contents
1. Formula Student Driverless Simulator
Formula Student is an international series of engineering competitions organized by Society of Automotive Engineers (SAE). The contest consists of static and dynamic events. Dynamic events include Skid Pad, Acceleration, Autocross, and Endurance.

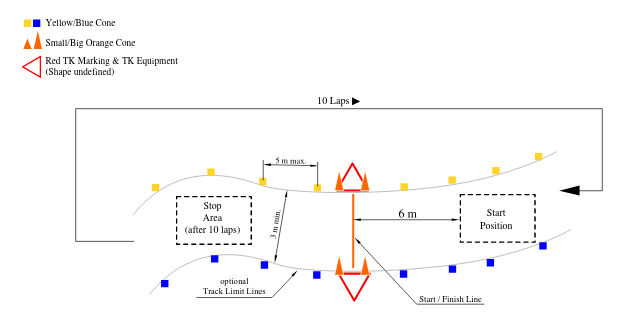
Formula Student Driverless is a dedicated class of Formula Student racecars to autonomous vehicles. This type was launched in 2017 at Formula Student Germany. In Driverless competitions instead of Endurance events, Trackdrive is held. The figure below depicts Trackdrive track marking.
Formula Student Driverless Simulator is a community-based project whose goal was to provide an end-to-end simulation for FS Driverless teams. The simulator was also used in online competitions FS-Online 2020.

Docker image used during laboratories is based on: - Formula-Student-Driverless-Simulator - ROS2 humble (in docker) - NVIDIA docker image with Vulkan and CUDAGL
2. Requirements
2.1. Hardware
* recommended system requirements:
- 8 core 2.3Ghz CPU
- 12 GB memory
- 30GB free SSD storage
- NVidia card with Vulkan support and 3 GB of memory
* testing machine:
- OS: Ubuntu 20.04.1 LTS 64-bit
- Intel® Core™ i5-8400 CPU @ 2.80GHz × 6
- RAM 15.6 GiB
- GeForce GTX 1060 6GB
* docker image size is about 9 GB2.2. Software
- docker >= 19.03
- NVIDIA GPU - nvidia-docker2 section installation on Ubuntu
3. Installation
You have two ways, you can try configure whole FSDS simulator with ROS2 by yourself or follow the steps from instruction.
Help for your steps
Your configuration probably would be fine if you are able to do exercises from 5th part of this instruction…
Instruction steps

Download fsds-v2.2.0-linux.zip on your computer from github: link
Create a new workspace on your computer.
Unzip fsds-v2.2.0-linux.zip to your new workspace.
unzip fsds-v2.2.0-linux.zip -d ./fsds_binCreate 2 folders in your workspace fsds-data and ros2_ws
Create .env file:
ROS_DISTRO=humble- Create Dockerfile.fsds-sim
ARG BASE_IMAGE=nvidia/vulkan:1.1.121-cuda-10.1-beta.1-ubuntu18.04
FROM ${BASE_IMAGE}
ENV DEBIAN_FRONTEND=noninteractive
# Fix NVIDIA CUDA repo (cuda-keyring) + de-dupe entries
RUN set -eux; \
mkdir -p /tmp/apt-disabled; \
for f in /etc/apt/sources.list.d/*nvidia* /etc/apt/sources.list.d/*cuda*; do \
[ -f "$f" ] && mv "$f" /tmp/apt-disabled/ || true; \
done; \
apt-get update; \
apt-get install -y --no-install-recommends ca-certificates wget dpkg; \
wget -q https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/cuda-keyring_1.1-1_all.deb -O /tmp/cuda-keyring.deb; \
dpkg -i /tmp/cuda-keyring.deb; \
rm -f /tmp/cuda-keyring.deb; \
for f in /tmp/apt-disabled/*; do \
[ -f "$f" ] && mv "$f" /etc/apt/sources.list.d/ || true; \
done; \
rmdir /tmp/apt-disabled || true; \
for f in /etc/apt/sources.list /etc/apt/sources.list.d/*.list; do \
[ -f "$f" ] && sed -i '\|developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64|d' "$f" || true; \
done; \
echo "deb [signed-by=/usr/share/keyrings/cuda-archive-keyring.gpg] https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64 /" \
> /etc/apt/sources.list.d/cuda.list; \
apt-get update; \
rm -rf /var/lib/apt/lists/*
# runtime deps for GUI + audio
RUN apt-get update && apt-get install -y --no-install-recommends \
libglu1-mesa \
libvulkan1 \
mesa-vulkan-drivers \
vulkan-utils \
pulseaudio \
x11-xserver-utils \
wget \
unzip \
&& rm -rf /var/lib/apt/lists/*
# FSDS binaries
# Create non-root user (FSDS refuses to run as root)
RUN useradd -m -s /bin/bash fsds && \
usermod -aG audio,video fsds
# FSDS install dir with correct ownership
RUN mkdir -p /opt/fsds && chown -R fsds:fsds /opt/fsds
# Copy FSDS binaries
COPY fsds_bin/ /opt/fsds/
RUN chown -R fsds:fsds /opt/fsds
# Start wrapper (auto-detect launcher)
RUN cat > /opt/fsds/run_fsds.sh <<'EOF'
#!/usr/bin/env bash
set -e
cd /opt/fsds
if [ -x ./FSDS.sh ]; then
exec ./FSDS.sh -settings /opt/fsds/settings.json
elif [ -x ./FSDS/Binaries/Linux/FSDS ]; then
exec ./FSDS/Binaries/Linux/FSDS -settings /opt/fsds/settings.json
else
echo "ERROR: cannot find FSDS launcher."
ls -la /opt/fsds | head -n 200
exit 1
fi
EOF
RUN chmod +x /opt/fsds/run_fsds.sh && chown fsds:fsds /opt/fsds/run_fsds.sh
USER fsds
WORKDIR /home/fsds
- Create Dockerfile.ros2
ARG ROS_DISTRO=humble
FROM ros:${ROS_DISTRO}-ros-base-jammy
ENV DEBIAN_FRONTEND=noninteractive
ENV CPLUS_INCLUDE_PATH=/usr/include/eigen3:${CPLUS_INCLUDE_PATH}
ARG ROS_DISTRO
RUN apt-get update && apt-get install -y --no-install-recommends \
software-properties-common \
&& add-apt-repository -y universe \
&& apt-get update \
&& apt-get install -y --no-install-recommends \
python3-pip \
python3-colcon-common-extensions \
python3-rosdep \
git \
libboost-filesystem-dev \
libboost-system-dev \
gazebo \
libgazebo-dev \
libeigen3-dev \
libboost-filesystem-dev \
libboost-system-dev \
libopencv-dev \
libsodium-dev \
libzmq3-dev \
gazebo \
libgazebo-dev \
ros-${ROS_DISTRO}-cv-bridge \
ros-${ROS_DISTRO}-image-transport \
ros-${ROS_DISTRO}-ament-cmake \
ros-${ROS_DISTRO}-ament-cmake-auto \
ros-${ROS_DISTRO}-rosidl-default-generators \
ros-${ROS_DISTRO}-ament-lint-auto \
ros-${ROS_DISTRO}-rviz2 \
ros-${ROS_DISTRO}-rviz-common \
ros-${ROS_DISTRO}-rviz-default-plugins \
ros-${ROS_DISTRO}-rqt \
ros-${ROS_DISTRO}-rqt-common-plugins \
&& rm -rf /var/lib/apt/lists/*
RUN mkdir -p /ros2_ws/src/fsds
WORKDIR /ros2_ws
RUN git clone --recurse-submodules --depth=1 https://github.com/FS-Driverless/Formula-Student-Driverless-Simulator.git /opt/fsds_repo
RUN cp -a /opt/fsds_repo/ros2/src/* /ros2_ws/src/fsds/
RUN ln -s /opt/fsds_repo/AirSim /ros2_ws/AirSim
RUN bash -lc "rosdep init || true && rosdep update"
RUN bash -lc "source /opt/ros/${ROS_DISTRO}/setup.bash && \
rosdep install --from-paths src --ignore-src -r -y"- Create docker-compose.yml
services:
fsds-sim:
build:
context: .
dockerfile: Dockerfile.fsds-sim
args:
BASE_IMAGE: nvidia/vulkan:1.1.121-cuda-10.1-beta.1-ubuntu18.04
image: fsds-sim:ubuntu18
network_mode: host
shm_size: "4gb"
runtime: nvidia
environment:
- DISPLAY=${DISPLAY}
- NVIDIA_VISIBLE_DEVICES=all
- NVIDIA_DRIVER_CAPABILITIES=compute,graphics,utility,display
- SDL_AUDIODRIVER=pulse
- PULSE_SERVER=unix:${XDG_RUNTIME_DIR}/pulse/native
volumes:
- /tmp/.X11-unix:/tmp/.X11-unix:rw
- ${XDG_RUNTIME_DIR}/pulse/native:${XDG_RUNTIME_DIR}/pulse/native:rw
- ~/.config/pulse/cookie:/root/.config/pulse/cookie:ro
- ./settings.json:/opt/fsds/settings.json:ro
- ./fsds-data:/root/.fsds
command: ["/opt/fsds/run_fsds.sh"]
fsds-ros2:
build:
context: .
dockerfile: Dockerfile.ros2
args:
ROS_DISTRO: ${ROS_DISTRO:-humble}
image: fsds-ros2:${ROS_DISTRO:-humble}
network_mode: host
environment:
- ROS_DOMAIN_ID=0
- RMW_IMPLEMENTATION=rmw_fastrtps_cpp
- ROS_DISTRO=${ROS_DISTRO:-humble}
- DISPLAY=${DISPLAY}
- QT_X11_NO_MITSHM=1
volumes:
- ./ros2_ws:/ws
- /tmp/.X11-unix:/tmp/.X11-unix:rw
command: ["/bin/bash", "-lc", "source /opt/ros/$ROS_DISTRO/setup.bash && sleep infinity"]- Create and copy settings.json from github site link
3.5 Run
- Add docker access to Nvidia and display
NOTE: This step is required in every new terminal session if it needs to run GUI applications (like simulator, rviz, rqt_plot).
xhost + local:root- Just run docker compose
docker compose up- Get into the running ROS2 container from another terminal
docker compose exec fsds-ros2 bash- Source ROS2:
source /opt/ros/humble/setup.bash- Change the settings.json path in src/fsds/fsds_ros2_bridge/launch/fsds_ros2_bridge.launch.py file from:
expanduser("~")+'/Formula-Student-Driverless-Simulator/settings.json'to:
/opt/fsds_repo/settings.json- Build ROS2 packages:
colcon build --symlink-install- Source again but now to:
source install/setup.bash4. Simulator usage
Simulator
Simulator starting simultanously with container, the menu should be opened and you can choose the maps.

Robot Operating System 2
start bridge between FSDS and ROS:
NOTE: this activates the autonomous state and disables keyboard control
ros2 launch fsds_ros2_bridge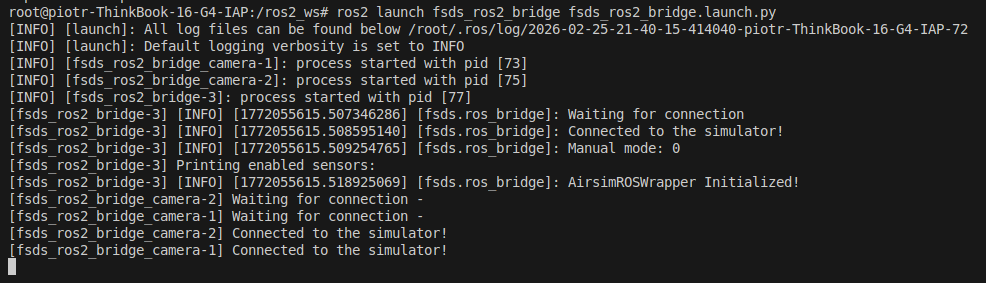
start rviz2, then open tf visualization, cameras and lidars:
rviz2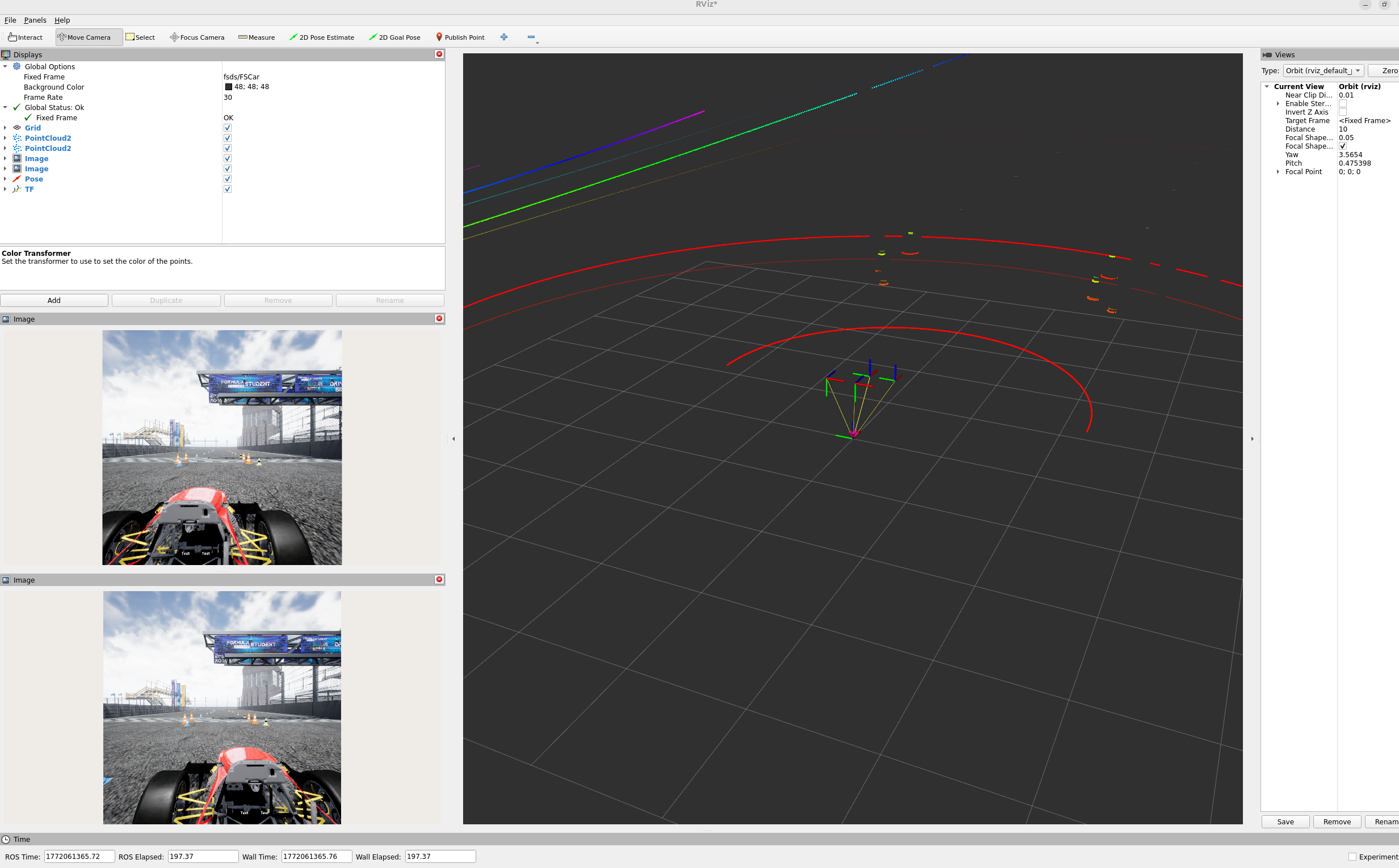
5. Tasks
Run container and check if everything works correctly.
Start the simulator, check available maps, and move the racecar using a keyboard.
Connect ROS2 with simulator using
fsds_ros2_bridgepackage and check available topics and services. Then compare the list with documentation.Create your own ROS2 package and create
sine_steering_node.pyin which you should implement steering method for race car based on sine signal. Use
- Build ROS2 environment calling
colcon buildfrom/ros2_wsfolder. - Source environment (
source install/setup.bash). - Test your control algorithm on the acceleration map with the running racecar by your code and try to move between yellow and blue cones, then stop before track end.
OUTCOME TASK
As a laboratory outcome take and add to the eKursy platform two screenshots of:
- simulator acceleration track running
- Rviz2 viewer with Lidar and Image messages added
and your implementation of sine_steering_node.py.